
Мною была приобретена плата микроконтроллера DFRduino Romeo. Эта плата является одним из клонов известного всем микроконтроллера Arduino Uno. На официальном сайте www.dfrobot.com есть раздел wiki , где можно найти информацию об использовании данного контролёра. Далее ниже предлагаю вам ознакомиться с переводом статьи DFRduino_Romeo-All_in_one_Controller
Описание контроллера сделанное ниже. Сделано для Romeo V1. Если вам необходимо описание для контроллера Romeo V1.1, то вам необходимо посмотреть другую ссылку на wiki — разделе официального сайта DFrobot.
DFRduino Romeo-All in one Controller V1.1(SKU:DFR0004)
- Пожалуйста прочитайте внимательно это руководство прежде чем вы подключите питание к плате Romeo.
- Не используйте устройство для военных и медицинских целей, так как данное устройство не проектировалось для этого.
Введение
RoMeo является контроллером «все в одном» специально сконструированный для применения робототехники. Выгоды использования платформы с открытым исходным кодом Arduino является поддержка тысячи источников открытого кода и может быть легко расширен с помощью большинства Arduino шилдов (Arduino Shields). Имеет интегрированное управление 2 DC мотором постоянного тока и разъём для подключения беспроводной связи (wireless socket). Все это даёт вам широкие возможности для начала вашего проекта по робототехнике.
Спецификация
- Atmega 168/328
- 14 цифровых канала ввода/вывода (Channels Digital I/O)
- 6 PWM каналов (Pin11,Pin10,Pin9,Pin6,Pin5,Pin3)
- 8 аналоговых 10-битных каналов ввода/вывода (10-bit Analog I/O)
- USB интерфейс
- Автоматическое определение источника питания/переключение ввода питания (Auto sensing/switching power input)
- ICSP разъём для прямой загрузки программы
- Последовательный интерфейс уровня TTL
- Поддержка AREF
- Поддержка Pin разъёмов «папа» и «мама»
- Интегрированный разъём для APC220 RF модуля и DF-Bluetooth модуля
- Пять Pin контактов I2C-интерфейса
- Возможность подключения напрямую двух DC-двигателей постоянного тока с максимальным током 2А
- 7 кнопок для управления (7 key inputs)
- Питание: USB или внешнее 7V~12V постоянного тока
- Выход постоянного тока: 5V /3.3V DC и внешний выход питания
- Размеры: 90×80 мм
DFRduino RoMeo Pin-выходы
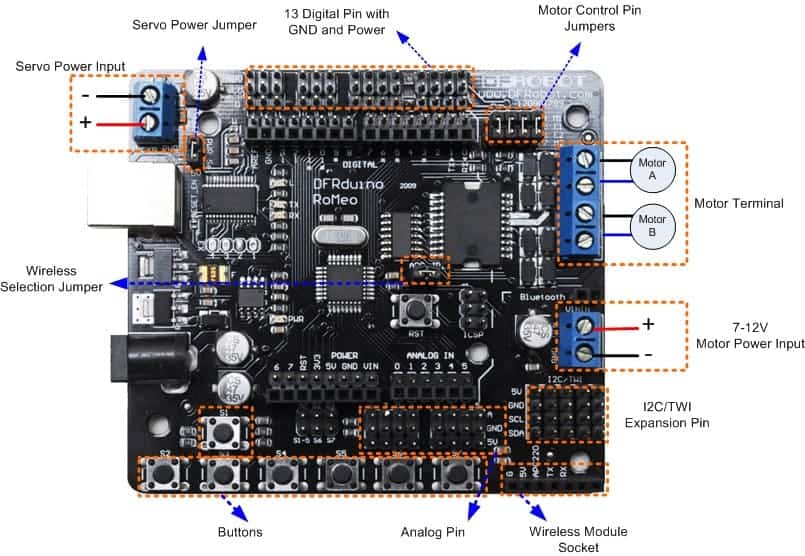
Рис.1
Это фото показывает все линии ввода/вывода и конекторы на плате Romeo, которые включают следующие:
- Одну клемму для входа управления питанием моторов от 6В до 12В (Motor Power Input)
- Одну интегрированную клемму входа питания серводвигателей . Вы можете отрегулировать напряжение от 4В до 7.2В (Servo Power Input)
- Один джампер перемычку серво-выхода питания (Servo Power Jumper)
- Один последовательный интерфейсный разъёмный модуль для APC220/Bluetooth модуля (Wireless Module Socket)
- Два разъёма подключения двигателей постоянного тока — максимальный ток 2А для каждого разъёма (Motor Terminal)
- Один I2C/TWI порт (I2C/TWI Expansion Pin) – SDA, SCL, 5V, GND
- Один аналоговый порт с 8 аналоговыми входами — один вход предназначен для подачи напряжения внутрь (Analog Pin)
- Один порт ввода/вывода общего назначения с 13 линиями входа/выхода — 4,5,6,7 могут быть использованы для моторов (13 Digital Pin with GND and Power)
- Одна кнопка перезапуска (Reset Button)
- Банк перемычек для включения/выключения управления двигателями (Motor Control Pin Jumpers)
Перед тем как начать
Подача питания
Это один из самых важных шагов в начале работы с платой Romeo и коммуникацией с хост-контроллером. Вы должны быть уверены, что используете при подключении к разъёму питания правильную полярность. Нарушение полярности подключения может привести к повреждению платы Romeo. Мы не несем ответственности за такой ущерб и наша гарантия не распространяется на такую разновидность ущерба. Убедитесь в том , что вы правильно подключили питание. В противном случае, это может принести вам финансовые потери!
Питание от USB: Просто подключите USB-кабель, и плата Romeo сможет работать. Обратите внимание, что USB может подавать ток только 500 мА. Такого питания должно быть достаточно для большинства применения светодиодных подключений. Однако этого недостаточно для питания двигателей постоянного тока или сервопривода.
Питание со входа питания двигателей: Просто подключите провод заземления от источника питания к винтовой клемме с надписью «GND“, а затем подключите положительный провод от источника питания к винтовой клемме с надписью»VIN».
Внимание! Максимальное поддерживаемое напряжение не должно превышать 14В.
Программное обеспечение
RoMeo может быть запрограммировано с использованием Arduino IDE 0014 и более поздних версий. Arduino IDE вы можете загрузить с http://arduino.cc/en/Main/Software, Пожалуйста выберите “Arduino Duemilanove w/ATMega328”, как аппаратное обеспечение.
Конфигурирование Romeo
Питание серво выбор перемычек (Servo Power Select Jumper)
Большинство сервоприводов требуют большей силы тока, чем может предоставить питание через USB. Для питания сервопривода по отдельности предусмотрен отдельный разъем питания сервопривода, который может быть включен/выключен перемычкой выбора питания сервопривода.
Когда применяется перемычка выбора питания сервопривода, то сервопривод питается по средством внутреннего напряжения 5В.
Когда перемычка выбора питания сервопривода не применяется, то сервоприводы питаются от внешнего питания.
Romeo версии 1.0 использует автоматический переключатель для выбора источника питания. Когда применяется внешнее питание, то сервоприводы автоматически переключаются на питание от внешнего источника вместо USB-питания.
Управление двигателями контактные (Pin) перемычки (Motor Control Pin Jumper)
Для применения контактных перемычек управления двигателем выделены контакты 5,6,7,8.
Удаление перемычек освободит вышеуказанные контакты.
Wireless перемычки (Wireless Select Jumper)
Применение Wireless перемычек позволяет Romeo осуществлять коммуникацию по средством таких модулей как APC220 и DF-Bluetooth модуля. Если модули беспроводной связи не установлены, то эти перемычки не имеют каких-либо установок.
Удаление перемычки отключат беспроводной модуль и позволят перезагрузить скетч-программу.
Руководство
Кнопки
RoMeo имеет 7 встроенных кнопок S1-S7 (Рисунок 2). S1-S5 используются для аналоговых входов, S6, S7 используются для цифровых входов 2 и 3.
| Pin | Function |
| Digital Pin 2 | Button S6 |
| Digital Pin 3 | Button S7 |
| Analog Pin 7 | Button S1-S5 |
Карта конекторов кнопок («Button Pin Map»)

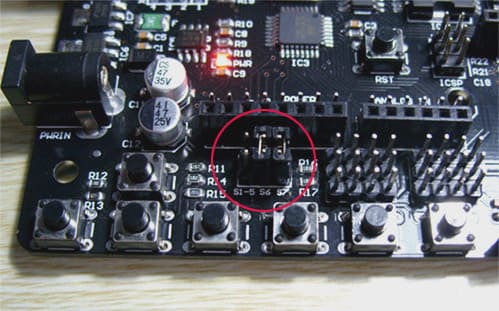
Рис.2
Чтобы включить S6 и S7, пожалуйста, примените перемычки, указанные в красном круге. S6 используется цифровой код PIN2, С7 использует цифровые Pin3. После того, как эти включения перемычки были применены, PIN 2 и 3 будут заняты (Рис. 3).
Управление скоростью двух моторов постоянного тока (Dual DC Motor Speed Control)
Настройки «железа»
Подсоедините ваши двигатели через клеммы двигателей и подключите питание к клеммам питания двигателей (рис.4).

Рис.4
Назначение контактов
| Pin | Function |
| Digital 4 | Motor 1 Direction control |
| Digital 5 | Motor 1 PWM control |
| Digital 6 | Motor 2 PWM control |
| Digital 7 | Motor 2 Direction control |
«PWM режимы»

| Pin | Function |
| Digital 4 | Motor 1 Enable control |
| Digital 5 | Motor 1 Direction control |
| Digital 6 | Motor 2 Direction control |
| Digital 7 | Motor 2 Enable control |
«PLL режимы”
PWM управление режимами
PWM управление двигателем постоянного тока осуществляется путем манипулирования двумя цифровыми ввода-вывода штырями (пинами) и двумя штырями PWM. Как показано на схеме выше (Рис. 5), контакты 4,7 (7,8 для старой версии Ромео) — это пины предназначенные для управления направлением движения двигателя, пин 5,6 (6,9 для старой версии Ромео) — это пины управления скоростью двигателей.
Для предыдущей версии платы Romeo пины, используемые для управления двигателем, — это пины 7,8 (направление), пины 6,9 (скорость). Вы можете найти информацию в правой части перемычек штифта управления двигателем.
PLL режимы управления (PLL Control Mode)
Плата Romeo позволяет поддерживать PLL Phase locked loop режимы управления.

Примеры кода программ смотрите по ссылке ниже.
https://wiki.dfrobot.com/DFRduino_Romeo-All_in_one_Controller__SKU_DFR0004_